【PR】省スペースに対応!パレタイザーのレイアウト事例
積み付け作業を自動化したいと考えていても、現状ではパレタイザーを置くようなスペースがない。パレットを供給する場所や通路まで考えたら、大掛かりな改修をしない限り自動化設備が入る余地がない。このような課題をお持ちではありませんか?

直交型に分類されるパレタイザーにおいては、設置スペースを抑えられるだけでなく、支柱が少ないことからレイアウトの自由が利き、台車やフォークリフト等のアクセスの利便性が高いのが特徴です。
そこで、本サイトで取り上げている省スペースを強みとするパレタイザーの中から、直交型でレイアウトの自由度が高いYUSHIN(旧:ユーシン精機)のPAシリーズの特徴やサイズを例に、一般的な多関節ロボットと比較してどのくらい省スペースなのか、レイアウトの自由が利くのかを検証してみます。
小型パレタイザーの利点と導入のポイント
省スペース設計
小型パレタイザーは、限られたスペースでも設置が可能です。例えば、狭い食品工場や製造業の倉庫など、既に工場のラインや配置などがあらかじめ決まっていて、限られたスペースしか使えない場合に効率的なパレット積みが可能です。在庫管理や作業動線の最適化といった課題を解消できます。
ランニングコストを抑制
小型のパレタイザーは大型のものに比べ、消費電力を抑えられるのもメリットといえます。特にエネルギーコストが大きな部分を占める業界や、企業のESG(環境・社会・ガバナンス)目標が高い場合で、省スペースでの稼働が可能な企業におすすめでしょう。
導入ハードルの低さ
最新の小型パレタイザーは操作が簡単で、短期間のトレーニングで使用できるようになります。また、設置や移動が容易であるため、生産ラインの変更やレイアウトの最適化が容易になります。
パレタイザーを選ぶときのポイント
検証1:直交型パレタイザーは多関節ロボットに比べ本当に省スペースか?
多関節ロボットは、アームを折りたたんだ状態においてはコンパクトで設置面も少なく省スペースなイメージですが、重要なのはアームを広げて作業する際の可動域やパレットを置いた際のスペースです。
直交型パレタイザー(PA20)と、一般的な多関節ロボットのサイズ(可動域)を比べてみましょう。
多関節ロボットは可動域が広く、スペースが必要

重要なのはパレタイザー本体のサイズではなく可動範囲です。XY軸が2700mm×3100mmのサイズの直交型パレタイザーの場合、XY軸の中で直線的な動きをし、パレットもこの中に設置されるため、可動域は2700mm×3100mmの範囲内になります。
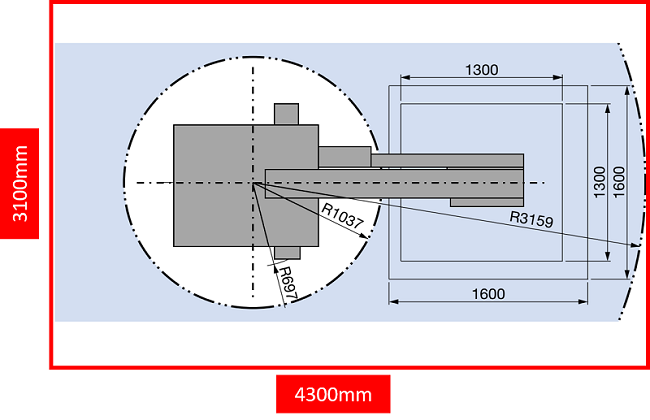
一方多関節ロボットの可動域を考える場合、アームの長さ(最大リーチ)+パレットを置く位置を考慮しなければなりません。アームは180度~360度近く旋回します。パレット1個分の可動域のみで考えた場合でも、3100mm×4300mmといったスペースの確保が最低限必要になります。
2タイプを設置したときの、省スペース性能比較
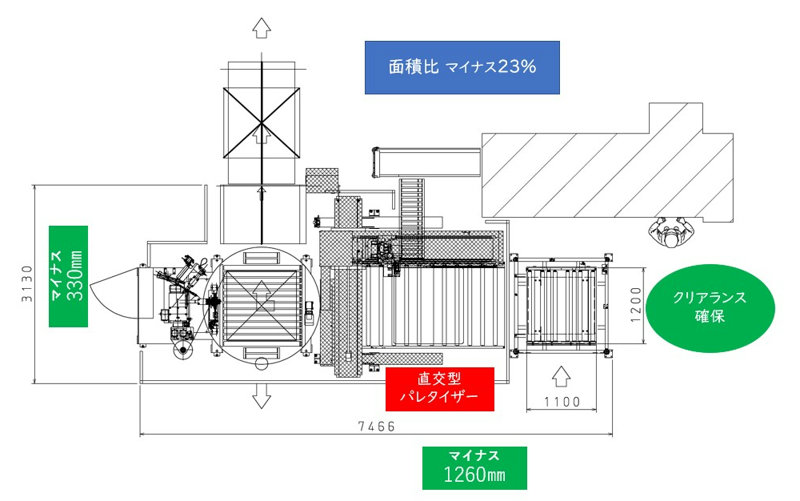

同じ現場のほぼ同じ位置に、多関節ロボットと直交型のパレタイザーを導入した場合、直交型が多関節より20%以上少ないスペースで収めることができています。
多関節ロボットの場合、ロボット単体のサイズで考えると省スペースで済むような印象ですが、実際はパレットを置くスペース、ロボットアームの曲線的な動き・旋回する可動域を考えると、必要なスペースが大きいことがわかるでしょう。
また、動きがダイナミックになることから、可動域に侵入できないよう安全柵を設けるのが通常です。
一方、直交型の場合は、縦横直線的な動き(UFOキャッチャーと同じような動き)しかしませんので、可動域といった場合にほぼ本体の縦横高さのサイズ内と変わりません。
検証2:直交型パレタイザーの省スペースレイアウト事例
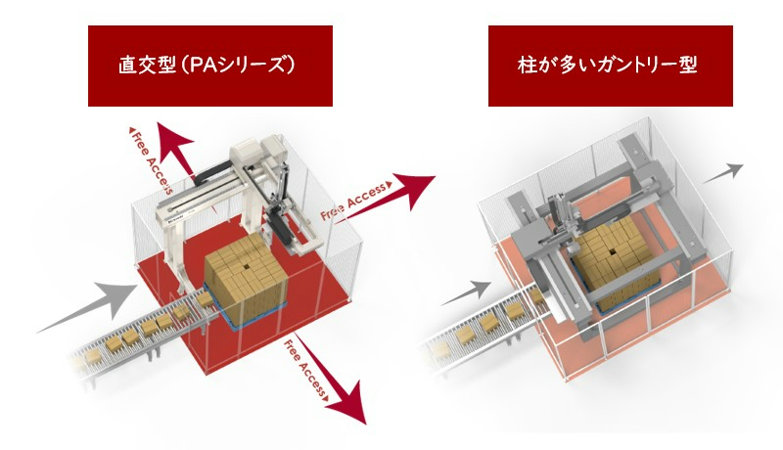
まずは、ガントリー型との違いですが、フォークリフトや台車等のアクセスは、アクセス方向が限られてしまうガントリー型ロボットに比べて、周囲に配置される支柱が少ないため、多関節ロボット並みの自由なレイアウトが可能です。
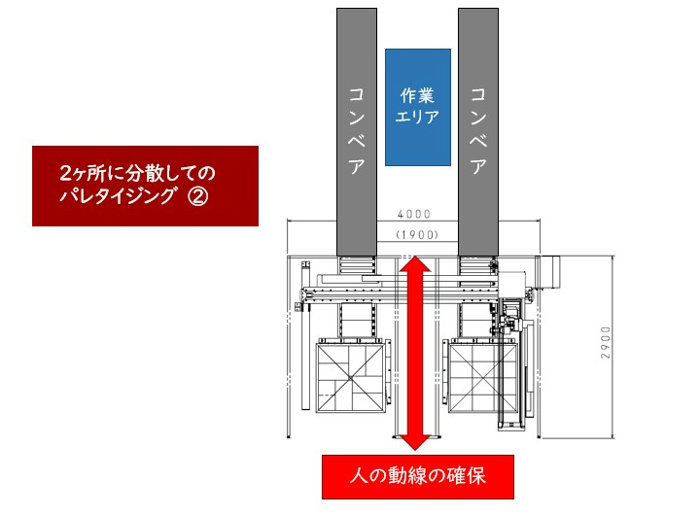
よりコンパクトなレイアウトは、上記のようにパレット1ヶ所でパレタイジングを行う方式ですが、PAシリーズのX軸は最大7mまで延長できるので、2ヶ所3ヶ所に分散してパレタイジングを行うレイアウトも可能です。
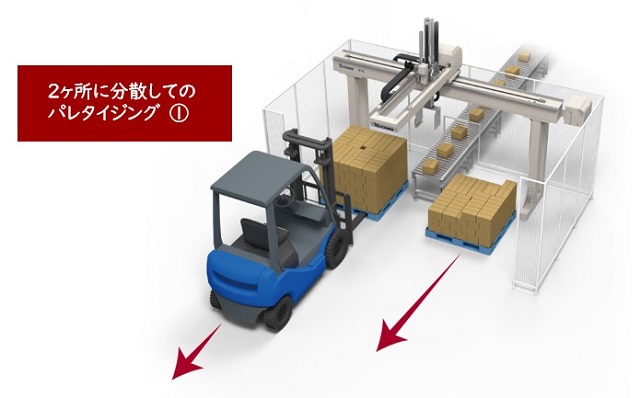
2ヶ所に分散でも、パレットとパレットの間に人の動線を確保することも可能です。
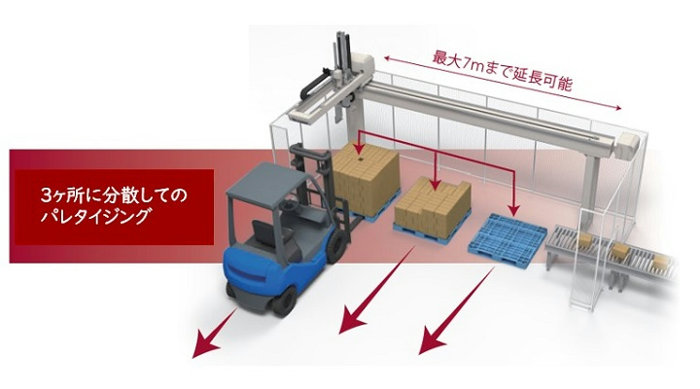
最大7mまで延長すると、3ヶ所分散してパレタイジングするレイアウトも可能。安全柵の設置場所を変えると別の方向からのアクセスも可能です。
このように、直交型のパレタイザーは、大きな改修をしなくても現状の設備を利用して導入できる省スペースなパレタイザーであり、多関節ロボットと比べても全体のスペースは少なくて済むことがわかります。
また、レイアウトもガントリー型に比べて支柱が少ない分パレットの分散も可能で、フォークリフト等のアクセスも自由度は高く、省人化、コスト削減、生産性向上が期待できます。
省スペースでパレタイザーを設置ならYUSHIN(旧:ユーシン精機)の「PAシリーズ」
射出成形品取出ロボットで改良を積み重ねてきた実績に基づいて開発されたパレタイジングロボット。
可搬質量20kgまで・40kgまで・50kgまでの3機種を展開。広いスペースが必要な多関節ロボットや、アクセスが1方向のみのガントリー型ロボットに比べ、省スペースでかつフリーアクセス、自由なレイアウトが可能です。
侵入禁止エリアも狭く、床置きのロボットコントローラがないので、大掛かりな工事の必要なく現在の限られたスペースを最大限に活用できます。X軸は最大7mまで延長可能、2ヵ所、3ヵ所に分散したパレタイジングにも対応します。
コントローラは片手で持ちやすく操作も簡単。基準ポジション1ヵ所と箱寸法、段数、積付パターンの入力でロボットがパレタイズパターンを自動演算、自動開始アイコンですぐに自動運転をスタートできます。位置補正機能もあり、ワンタッチでパターン変更も可能です。
ロボットハンド設計に目的に合わせて特注対応。メーカーによるスピーディな設置によって、ライン停止は最小限に抑えて導入できます。全国に拠店があり保守部品を在庫しているため、迅速なメンテナンスが可能。安定した運用が実現できます。
YUSHIN(旧:ユーシン精機)について

1973年10月に設立されたYUSHIN(旧:ユーシン精機)は、各種自動機を設計・製造からスタートした企業です。1978年に工業製品のプラスチック成型において欠かせない「プラスチック製品取出ロボット」を開発。以来、プラスチック業界の発展とともに歩みを進めてきました。
現在は取出ロボットを中心にプラスチック射出成形工場の合理化、FA化を推進する機器、システムの開発、製造、販売などを手掛け、2020年には、培ってきた技術を応用し、製造や物流の現場で活用できる省スペースパレタイザー(PAシリーズ)を開発しました。
業界の常識に縛られることなく、顧客の要望に応えることができるよう新しい技術に挑戦している企業です。
YUSHIN(旧:ユーシン精機)の小型パレタイザー製品PAシリーズ一覧
PA-20の基本スペック

| タイプ | 直交型 |
|---|---|
| 対象物 | 段ボールケースなど |
| 可搬重量 | 20kg |
| 必要最小スペース | 3.1m×2.7m×3.3m |
| ストローク | 1.8m×1.06m×1.3m 320度 |
| 処理能力 | 420cycle/h(7cycle/min) |
PA-40の基本スペック

| タイプ | 直交型 |
|---|---|
| 対象物 | 段ボールケースなど |
| 可搬重量 | 40kg |
| 必要最小スペース | 3.4m×3.3m×4.3m(7mまで延長可能) |
| ストローク | 1.8m×1.49m×1.8m 280度 |
| 処理能力 | 360cycle/h(6ycle/min) |
PA-50LCの基本スペック

| タイプ | 直交型 |
|---|---|
| 対象物 | 段ボールケースなど |
| 可搬重量 | 50kg |
| 必要最小スペース | 2.8m×3.1m×3m |
| ストローク | 1.6m×1.2m×1.8m 360度 |
| 処理能力 | 500個/時間(8.3個/分) |